Durant ces trois jours des équipes de recherche académique et des industriels vont déployer leurs robots sous-marins depuis le port de boulouris.
Des essais et des démonstrations auront lieu directement à quai et d’autres au large sur les sites du Lion de Mer et de l’Ile d’or.
Ces journées sont l’occasion de faire sortir nos robots de leurs habituels bassins d’essai et de tester nos prototypes dans des conditions marine et sur des sites naturels afin de valider nos développements : visibilié troublée sous l’eau, houle, courant, vent.
Les engins sous-marins effectueront des missions de suivi d’émissaire et de cartographie 3D des sites sélectionnés.
L’accés au port est public. N’hésitez pas venir à notre rencontre.
Dates importantes :
- À partir de janvier 2022 : pré-inscription en ligne et appel à résumés
- 15 mars 2022 : date limite de soumission des résumés
- 30 mars 2022 : date limite des inscriptions finales (avec paiement en ligne)
- 5-8 avril 2022 : Submeeting 2022
Les expériences et les démonstrations prévues
- Présentation du matériel Blue Robotics et la gamme de connecteurs sous-marins Cobalt – Syerra
- Reconnaissance automatique de gestes de plongeurs – COSMER projet DPII
- Suivi d’émissaire au départ de la plage de boulouris – CNRS I3S équipe OSCAR
- Cartographie 3D – voir challenge
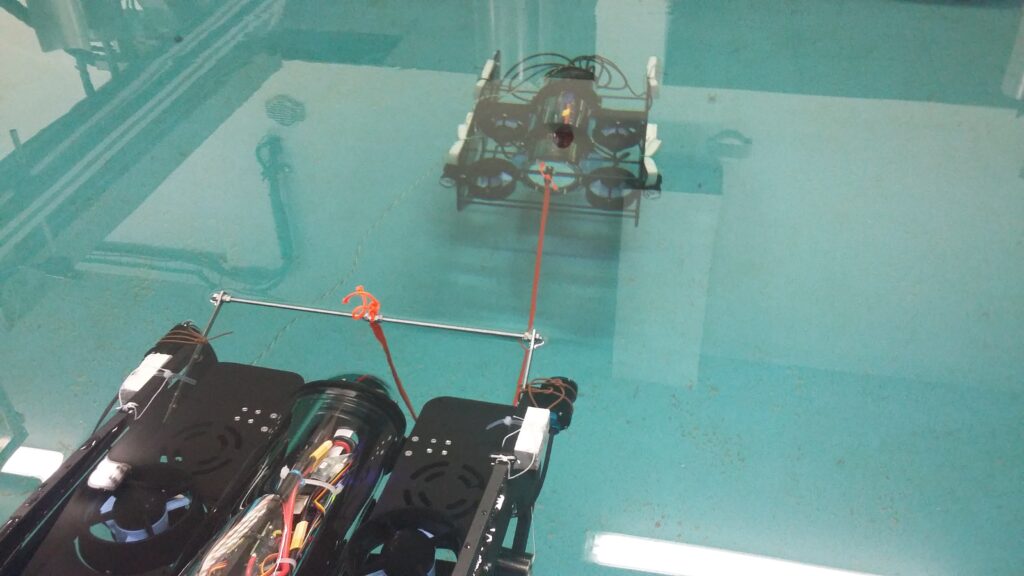
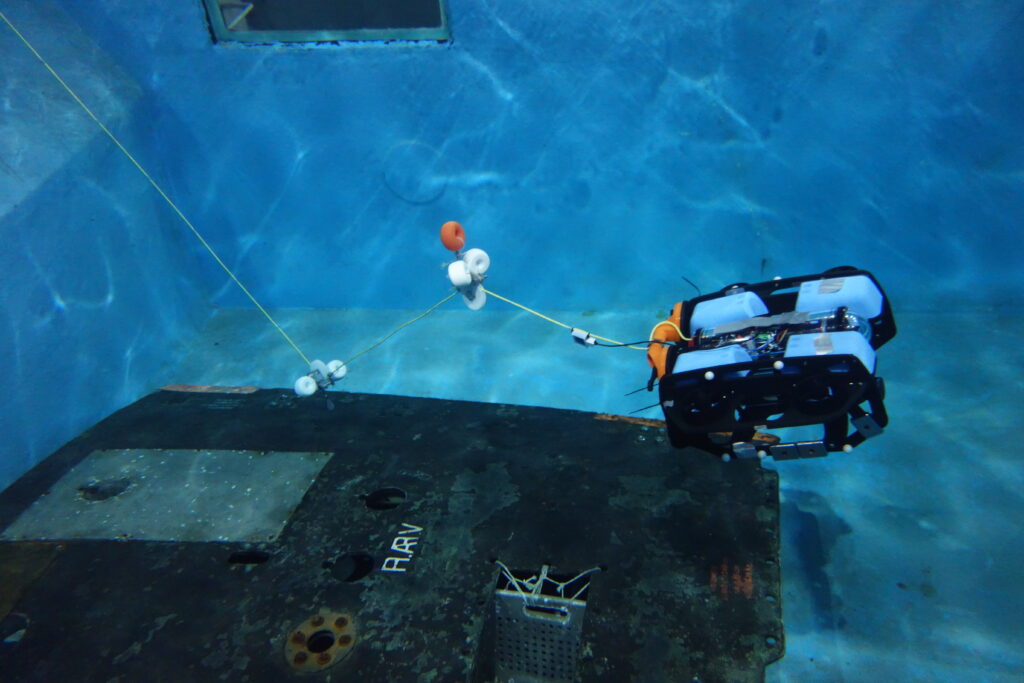
- Evaluation de technique de gestion des cables des Rov (Cordée de robots, lests et flotteurs) – COSMER et ENSTA Bretagne
- Evaluation de controle robotique autonome au port et en mer
Les robots et les équipes
Les étudiants du Master Mundus MIR de l’Université de Toulon
Le Master of Science en robotique marine et maritime intelligente (MIR) associe la robotique et l’intelligence artificielle de manière innovante dans le cadre du développement des sciences marines et maritimes et de leurs applications technologiques. Il vise à façonner les compétences nécessaires aux avancées dans les domaines liés à la mer, en particulier dans la mise en œuvre de robots marins et sous-marins autonomes dotés de capacités de téléopération, et dans l’utilisation de l’intelligence artificielle dans ces domaines. En première année, le 24 étudiants de Master 1 sont accueilli à l’Université de Toulon, afin d’obtenir une formation solide en sciences marines, robotique et intelligence artificielle, et de suivre des séminaires spécialisés dans l’industrie. En deuxième année, les étudiants choisissent une spécialisation en intervention sous-marine à l’Université Jaume I (UJI, Espagne), en opérations sous-marines autonomes à la Université norvégienne des sciences et technologies (NTNU), ou en robotique coopérative pour véhicules marins à l’Instituto Superior Técnico (IST-UL, Portugal) .
Laboratoire COSMER Université de Toulon
Le laboratoire COSMER est une Equipe d’Accueil de l’Université de Toulon, crée en 2015. Elle développe des recherches en robotique, en éco-conception mécanique et en fabrication additive. Ses recherches en robotique sous-marine portent sur la modélisation hydrodynamique, la gestion des ombilicaux, la commande simple, en cordée ou en flottille, et les interactions drone-plongeurs. La flotte du COSMER comprends essentiellement des petits robots d’une dizaine de kilogrammes, facilement déployable à la main par une personne.
Il est possible de mutualiser les équippements du COSMER sur ces journées du submeeting. Tous les robots du COSMER fonctionnent sous ROS.
Coralie (Subseatech)
C’est un mini ROV de la société Subseatech qui mesure environ 50cm de long et pèse 12 kg. Coralie est équipée de toute la charge utile usuelle en robotique sous-marine, à savoir un DVL, deux caméra analogiques PAL, un sonar a balayage, un USBL avec relai GPS. C’est un ROV idéal pour tester la fusion de données pour la localisation et la navigation. Elle a trois propulseurs et est non holonome.
Les Blue Rovs
La flotte des Blue Rov est commune au Cosmer et à l’école Seatech. Chaque robot est unique et a des capteurs adapté au projet auquel il est dédié. Ils ont tous en série une caméra et une centrale inertielle. Ils sont monté dans la version heavy, c’est à dire avec 8 propulseurs. Ils sont holonomes. Selon le montage, nous avons un DVL, un pinger, un sonar.
Seasam (Notiloplus)
Le robot Seasam est particulièrement adapté pour la coopération drone-plongeur. Il peut être utilisé en mode ROV, Mixe ou AUV. Il dispose d’une télécommande ultra son qui fonctionne avec un pinger. Il est équipe d’une caméra et d’une centrale inertielle, ainsi que d’hydrophones pour réceptionner le signal du pinger.


LABSTICC ENSTA Bretagne
L’Equipe de l’ENSTA Bretagne développe des robots marins et sous marins autonomes.
de données de terrain

Équipe SEAL (Sense Explore Analyse & Learn) – EPITA
L’équipe SEAL, dont l’une des spécialités est la conception de micro-robots facilement déployables et de leurs charges utiles associées, sera présente avec son petit robot de surface : le Kraken. Il s’agit d’un catamaran dédié à la cartographie sous-marine qui peut se déplacer de manière autonome ou être piloté depuis la station sol. Il sera équipé d’un banc de caméras stéréoscopiques synchronisées conçues par l’équipe et pourra fournir des données additionnelles comme la position GPS des prises de vues. De par sa position en surface, il s’intéressera aux fonds n’excédant pas 20 m. L’équipe apportera également des GoPro et une caméra 360 (Insta One X).
Kraken : mini catamaran de surface autonome


Mesures de vérités terrain


Ils ne sont pas motorisés, mais ils sont autonomes et comme des poissons sous l’eau ^^. Les deux plongeurs de l’équipe SEAL mettront en place sur les zones d’études des réseaux de mires sous-marines (équivalents des Ground Control Points — GCPs — aériens) pour fournir une vérité terrain. Cette dernière permettra de contrôler les résultats obtenus par les reconstructions 3D ou mosaïquages réalisées à partir des données récoltées. L’équipe répartit les mires sur le fond de manière à capter les variations de sous-parties de la zone d’étude, puis elle relève leurs profondeurs, leurs distances entre-elles (environ 3 mesures par mires) et leurs positions GPS approximatives prises depuis la surface.