Jeudi 7 avril
Soirée tout public, gratuite, entrée libre

83700 SAINT-RAPHAEL (credit photo : ville de saint Raphaël)
En marge du SUBMEETING 2022, Nous vous invitons à une soirée de conférences pour tout comprendre et une table ronde pour réfléchir ensemble aux Océans du futur et au futur des océans. Nous verrons quels sont les enjeux des prochaines décennies et comment maintenir l’équilibre fragile entre exploitation et préservation des ressources maritimes. Nous parlerons d’archéologie, de biologie, de changement climatique, nous imaginerons comment la robotique sous-marine peut aider dans la recherche et le maintien de cet équilibre et enfin, nous vous proposerons un dispositif de sciences participatives.
Une soirée ouverte à tous, avec Marine Leteurtrois, (ingénieur Semantic TS), Jan Opderbecke (Directeur du service des systèmes sous-marins), Anne Joncheray (Archéologue, Direction du musée archéologique de Saint-Raphaël), Isabelle Taupier Letage (chargée de recherche au CNRS), et Luc Jaulin (Professeur à l’ENSTA Bretagne) pour explorer les océans et tout comprendre sur la robotique sous-marine autour de conférences et d’échanges.
Entrée libre et gratuite, venez nombreux ! (à partir de 10 ans)
Quoi de mieux que de connaître l’histoire d’un lieu pour le préserver ?
Anne Joncheray, archéologue, directrice du musée archéologique de Saint-Raphaël.

Le patrimoine archéologique raphaëlois est l’un des plus importants, on dénombre sur 30 km de côtes une quinzaine d’épaves de toute époque.
Des découvertes qui n’ont cessé depuis l’invention du scaphandre autonome à nos jours. Le Commandant Yves Le Prieur, développe le premier matériel respiratoire autonome : l’homme poisson naît à Saint-Raphaël en 1926. Les explorations du Lion de Mer, du Dramont, d’Agay, jusqu’au Trayas révéleront d’épaves d’époque antique, médiévale, moderne et contemporaine.

Des fouilles archéologiques ont été menées durant de plusieurs années, enrichissant ainsi le musée archéologique de Saint-Raphaël. Cependant, il reste des vestiges de navires ou de cargaisons encore immergés, que seuls les plongeurs peuvent découvrir, si toutefois, ils sont bien attentifs au relief sous-marin ! Des blocs de marbre romain, une proue du XVe siècle, des canons du XVIe siècle, des ancres de tartane du XIXe, les prototypes d’hydravions, des dragueurs de mines, des péniches de débarquement, des petits chalutiers, voire des voiliers… Un patrimoine méconnu, qu’il est important de faire connaître et de préserver.
L’exploration sous-marine en autonomie
Luc Jaulin, Professeur à l’ENSTA Bretagne et chercheur au Lab-STICC (CNRS/ENI Brest/ENSTA Bretagne/IMT Atlantique – Institut Mines-Telecom/Université Bretagne Occidentale/Université Bretagne Sud)

L’homme effectue dans l’océan de nombreuses missions longues et périlleuses comme le transport de marchandises, la construction d’infra-structures offshore, la recherche d’épaves, etc.
Du fait de la pénibilité, du coût, et de la dangerosité de ces missions, les robots marins y sont de plus en plus utilisés. De nos jours, ils le sont principalement pour la prise de mesures, la construction de cartes sous-marines, la recherche de mines ou l’étude des courants marins. Afin d’éviter les collisions avec le trafic en surface, on demande généralement aux robots de rester sous l’eau et de ne jamais refaire surface. La localisation devient difficile et même souvent impossible du fait de l’absence d’amers (points de repère à terre utilisés pour se repérer en mer) et du non fonctionnement du système de Géolocalisation et navigation par un système de satellites (GNSS). En mimant les techniques des anciens navigateurs, ou des animaux marins (comme les tortues marines), un robot sous-marin peut explorer un environnement très vaste et revenir à sa position initiale, sans pour autant être capable de se géolocaliser.
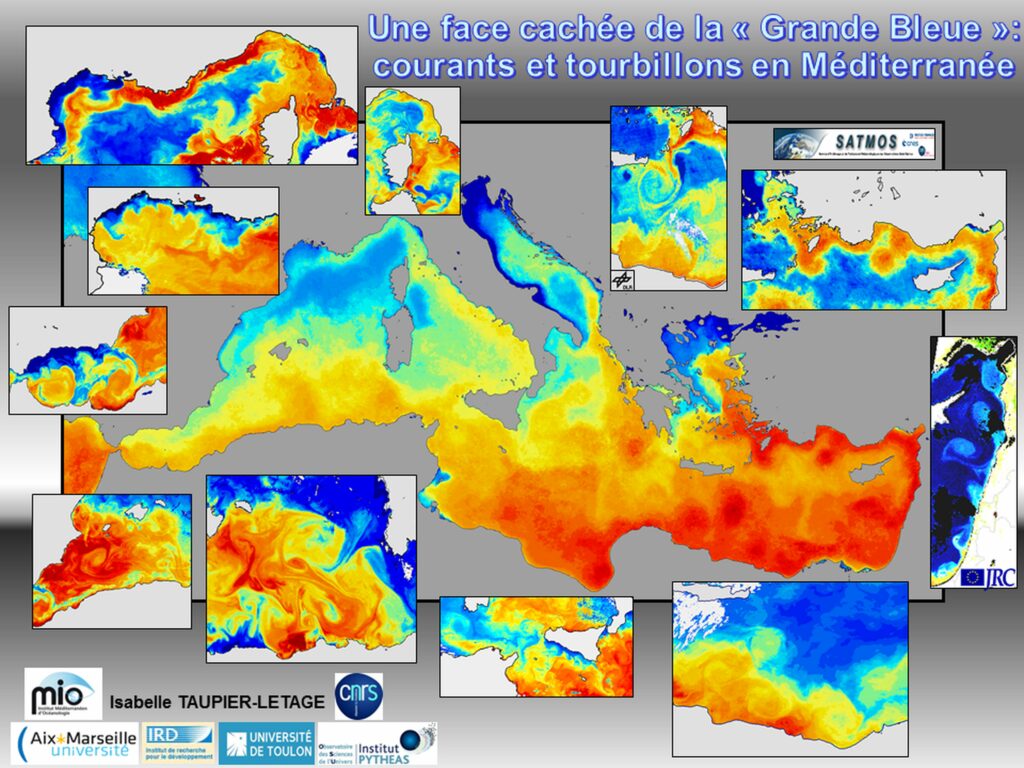
Les courants marins en Méditerranée
Isabelle Taupier-Letage, Chargée de recherche CNRS Mediterranean Institute of Oceanography MIO, OPLC-Océanographie Physique Littorale et Côtière

La Méditerranée n’est pas, comme son surnom de « Grande Bleue » pourrait le suggérer, une longue mer tranquille.
Si la circulation générale des masses d’eau est bien connue (en sens anti-horaire dans les 2 bassins), ce n’est qu’à l’échelle de l’année. En effet à un instant t un océanographe ne pourra pas dire dans quel sens va le courant sans une information essentielle (d’origine satellitale): la position des tourbillons dans les moitiés Sud -et la position des méandres le long des côtes Nord dans une moindre mesure. Dans les parties Sud en effet les courants engendrent des tourbillons (10ne-100ne de km de diamètre) auxquels sont associés des courants de ~50cm/s (~1 nœud) dans les 360° possibles sur leur périphérie, y compris en sens inverse du courant moyen. Ces tourbillons se déplaçant et interagissant, la variabilité spatiale liée aux positions des tourbillons est doublée d’une variabilité temporelle qui affecte non seulement les courants, mais aussi les masses d’eau. Dans les parties Nord l’instabilité des courants est moindre (méandres principalement), mais il y a des phénomènes de remontée d’eau profonde (donc froide) liés au vent (« upwellings ») qui perturbent non seulement les touristes (eau de surface à ~15°C vs 30°C dans l’air en Août) mais aussi certaines bases de données climatologiques. Les mesures faites sur le long terme en profondeur montrent une augmentation de la température et de la salinité dans les eaux profondes formées en Méditerranée. Mais leurs effets respectifs sur la densité étant opposés, les simulations climatiques ne montrent pas pour l’instant de changement radical du fonctionnement de la Méditerranée.
Enjeux scientifiques et technologiques de l’exploration des grands fonds.
Jan Opderbecke, Chef de l’Unité Systèmes Sous-Marins (PDG-DFO-SM). Rattachement secondaire : Service Positionnement, Robotique, Acoustique et Optique (PDG-DFO-SM-PRAO)

Jan Opderbecke travaille depuis de nombreuses années sur les engins sous-marins pour l’exploration des grands fonds. Docteur en physique, son domaine d’intérêt est la navigation sous-marine et la cartographie des fonds marins. Il dirige aujourd’hui l’Unité des Systèmes Sous-Marins de l’Ifremer, qui est en charge du développement des systèmes sous-marins opérationnels et de la gestion de leur cycle de vie, pour la flotte océanographique française. A ce titre, l’unité conduit de nombreuses actions de R&D dans les technologies sous-marines en partenariat avec les laboratoires de recherche et les entreprises.
La présentation donnera un aperçu des robots et véhicules utilisés dans l’exploration des grands fonds, des enjeux océanographiques et des défis technologiques de l’intervention profonde, pour lesquelles les essais de robotique du Submeeeting préparent l’avenir.
Projet MERRITOIRE
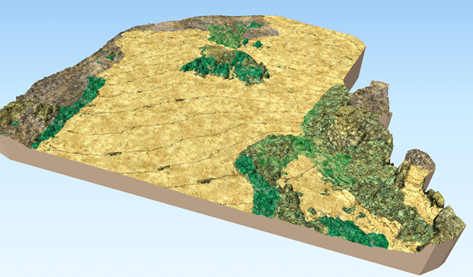
Marine Leteurtois, chargée de projet chez SEMANTIC TS présente MERRITOIRE : la modélisation 3D des fonds marins dédiée au sport, au tourisme et à l’environnement.

La modélisation 3D est un outil d’avenir pour la découverte, la valorisation et la protection du milieu marin que nous admirons tous en tant que professionnels de la mer ou citoyens engagés.
SEMANTIC TS a créé la première plateforme dédiée à la modélisation haute résolution des fonds marins côtiers en 3D de Méditerranée française. Cette initiative touche directement les acteurs des activités subaquatiques (plongée sous-marine, randonnée palmée, apnée), les gestionnaires d’aires marines protégées et les professionnels du tourisme qui pourront grâce à cet outil innovant valoriser leurs activités et leur patrimoine marin dans le respect d’une économie bleue durable.
Pionnier en la matière, SEMANTIC TS édite déjà depuis 2004 des cartes en relief des sites de plongée dans le Var et les Bouches du Rhône. Les progrès technologiques ayant largement évolué depuis (digitalisation, smartphones, réalité augmentée…) le projet répond à un réel besoin et vise à combler un évident retard comparé à ce qui existe déjà hors de l’eau.
En tant que scientifiques, il est aussi de notre devoir de faire partager et de démystifier ce milieu au plus grand nombre pour mieux le comprendre, l’aimer et le protéger. Les modèles 3D ne sont pas de simples cartes destinées aux plongeurs à s’orienter, ce sont aussi de véritables supports pour communiquer sur l’environnement, s’approprier notre patrimoine marin et valoriser les activités autour de la mer. SEMANTIC TS propose donc de faire participer à cette aventure les plongeurs les plus motivés pour réaliser des cartes texturées en plongée.